


First Sensor芯片粘接技术
芯片粘接
相比传统部件(例如表面贴装器件(SMD)),裸芯片的使用能够带来诸多益处。芯片粘接是指使用恰当粘合剂将晶圆各个芯片粘接到基材上的一种技术。
First Sensor的技术
板上芯片技术(Chip-on-Board(COB))
倒装芯片技术(Flip-Chip)
玻璃上芯片(Chip-on-Glass (COG))
金属上芯片(Chip-on-Metal (COM))
薄膜上芯片(Chip-on-Flex (COF))
陶瓷上芯片(Chip-on-Ceramic (COC))
晶片堆叠技术(Die Stacking)
使用裸芯片的优点:
通过缩减外形尺寸实现产品微型化
通过减少联系点有效提高可靠性
对(陶瓷)印刷电路板具有优异热适应性
可实现气密封口(塑料部件能够吸收水分并将水分释放到特定套管内)
半导体光发射器和探测器的精准计数
通过减少过渡点数量来减少散热片上半导体的热阻(例如LED的p区和n区可直接封装至散热片上)
技术参数
裸芯片外形尺寸:0.25mm至80mm
从晶圆、蓝箔封装或waffle pack盒上取得晶粒
导电胶的应用:丝网印刷、分装或冲压
功率半导体器件在真空或氢气中的(无钎)共晶焊接
印刷电路板(印刷、分装或通过预成行焊片)上焊锡膏的应用
裸芯片的精确定位(系列:相对基准结构或印刷电路板的电路载波基准,少量<0.005mm,用于特殊应用时可达0.001mm)
倒装芯片计数
压力传感器常用术语
下面是压力传感器选型时常用的术语:
标准压:以大气压为标准表示的压力大小,大于大气压的叫正压;小于大气压的叫负压。
绝对压:以绝对真空为标准表示的压力大小。
相对压:对比较对象(标准压)而言的压力大小。
大气压:指大气压力。标准大气压(1atm)相当于高度为760mm水银柱的压力。
真空:指低于大气压的压力状态。1Torr=1/760气压(atm)。

检测压力范围:指传感器的适应压力范围。
可承受压力:当恢复到检测压力时,其性能不下降的可承受压力。
往返精度(ON/OFF输出):当一定温度(23°C)下,当增加、减少压力时、用检测压力的全标度值去除输出进行反转的压力值而得到的动作点的压力变动值。

精度:在一定温度(23°C)下,当加零压力和额定压力时,用全标度值去除偏离输出电流规定值(4mA、20mA)的值而得到的值。单位用%FS表示。
线性:模拟输出对检测压力呈线性变化,但与理想直线相比有偏差。用对全标度值来说百分数来表示这种偏差的值叫线性。
磁滞(线性):用零电压和额定电压在输出电流(或电压)值间画出理想直线,把电流(或电压)值与理想电流(或电压)值之差作为误差求出来,再求出压力上升时和下降时的误差值。用全标度的电流(或电压)值去除上述差的绝对值的最大值所得的值即为磁滞。单位用%FS表示。
磁滞(ON/OFF输出):用压力的全标度值去除输出ON点压力与OFF点压力之差所得的值既是磁滞。
非腐蚀性气体:指空气中含有的物质(氮、二氧化碳等)与惰性气体(氩、氖等)
如何用加速度计提高倾角测量精度
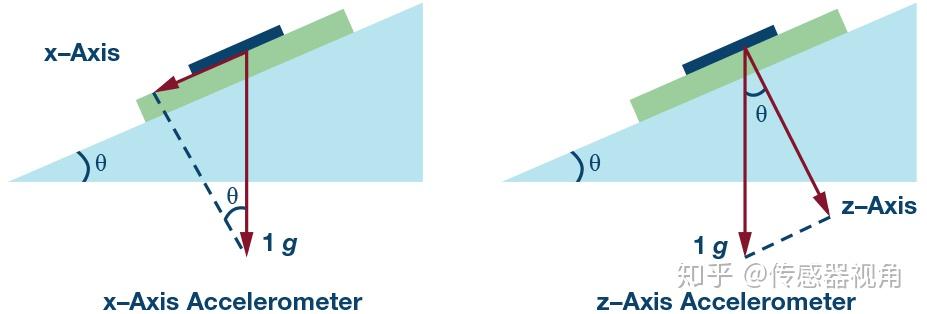
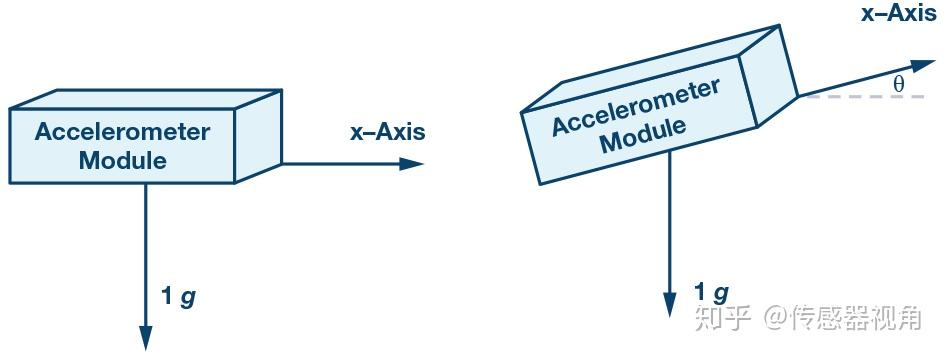
本文旨在探讨如何用组合器件一类的加速度计提高倾角测量的精度。在乘用车上,电动驻车制动器(EPB)被用于使汽车在平坦的分级道路上保持静止。这是通过用一个单轴或双轴加速度计测量倾角来实现的。一般做法是将一个X轴/Y轴或Z轴低g加速度计装在EPB控制单元中一个专门的模块中。现在,越来越多的汽车配有ESC(电子稳定控制)功能,在单个芯片中集成了组合式低g加速度计和陀螺仪。这样做是为了防止汽车侧滑和翻车;如今,ESC功能已经成为世界各国或地区法律的强制要求。如果通过组合器件(单芯片、组合式加速度计和陀螺仪)实现倾角测量,则不必在车上安装一个独立的EPB模块,结果可以大幅降低汽车的成本。由于组合器件通常用于ESC,所以并未针对倾角检测优化,并且通过组合器件测量倾角时,测量精度有时无法达到要求。由于组合器件是XY轴或XYZ轴,所以通常用X轴进行倾角测量,EPB模块中的部分传统型低-g加速度计使用的是Z轴,因为它是垂直安装在发动机舱里的。检测轴应该与重力垂直,才能取得更高的精度——我们稍后会讨论这一点。
对于汽车中的倾角测量,评估精度是非常重要的。不妨想像,您的车停在绝对平坦的地面,因此,加速度计计算的倾角应该是0°。如果您的车停在斜坡上,就应该精确地检测出倾角,以便正确地激活刹车系统。

因此

其中:
AOUT 为加速度计的输出,单位为g。
θ 为斜坡的倾角,单位为度。
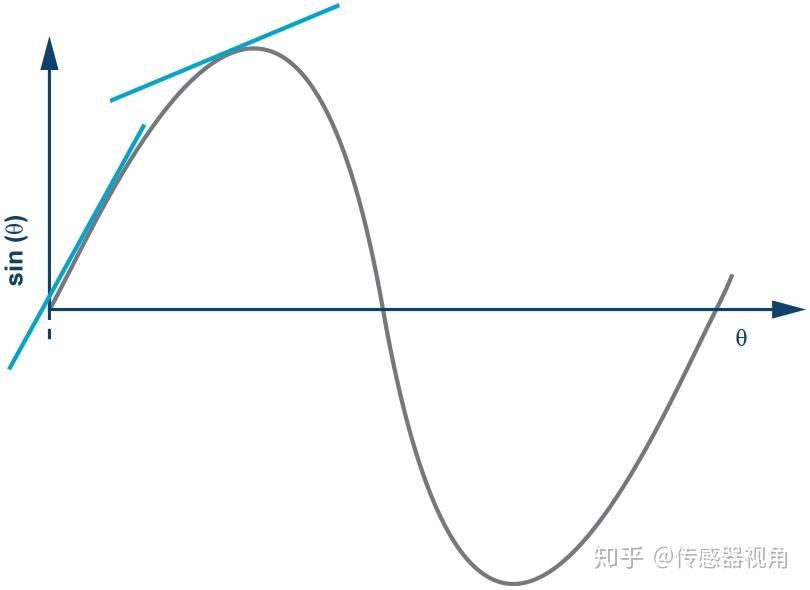
由于sin θ是一个非线性函数,所以,AOUT与θ之间的关系是非线性 的,在接近零时其线性度处于最佳状态,即其此时具有最佳的测量精度。随着θ的增大,测量精度下降。这正是检测轴应与重力垂直的原因,因为道路坡度将接近零
对于汽车倾角测量,不必在全斜坡坡度的条件下考虑系统。现实世界中,道路上的绝大多数斜坡坡度不会超过30°。我们只需要分析在±30°的范围内分析贡献因素的精度即可。
影响系统级测量精度的贡献因素有多个:
灵敏度误差和初始绝对失调
非线性度
与初始绝对失调的总失调变化
噪声
灵敏度误差和初始绝对失调
灵敏度误差
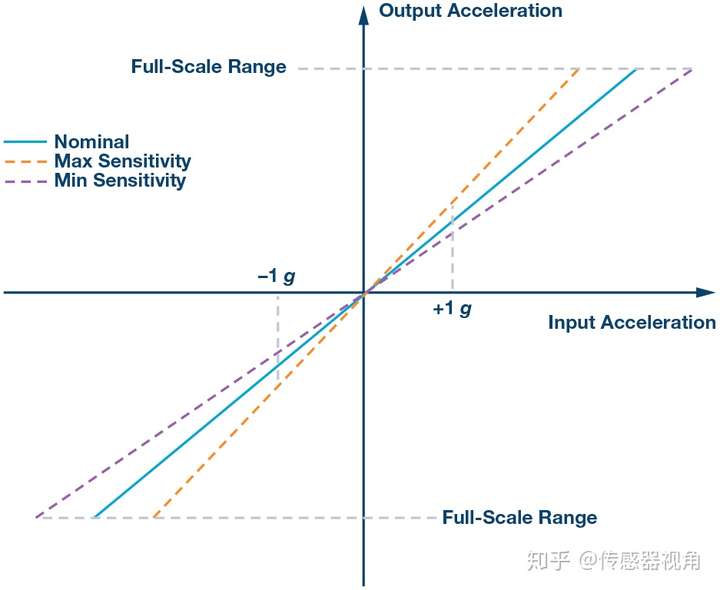
灵敏度是对输入-输出测得的传递函数的斜率,通常为+1g和–1g。灵敏度误差为器件间的灵敏度偏差。例如,有些加速度计的最大灵敏度为3%。
初始绝对失调
范围内的失调约为25°C;例如,在模块制造完成后立即测量的值为25°C ± 5°C。初始绝对失调表示大量器件的实测偏移值的标准差。
两点校准
对于倾角测量应用,两个主要的误差来自失调误差和灵敏度误差。这两种误差会导致不可接受的检测结果,因此不得忽略。如果我们希望消除这些部分误差,则应对加速度输出进行校准。一般地,要对倾角测量的失调和灵敏度进行一次校准。若要考虑失调和灵敏度误差,则加速度计输入与输出的关系为:

其中:
A输出 为失调误差,单位为g。
增益为加速度计的增益,理想值为1。
A实际为施加于加速度计的实际加速度,单位为g。
有两种基本校准技术;其中一种是单点校准。这种校准的具体做法是在加速度计上施加一个0g场,然后测量输出。这类校准只能用于校准失调误差,不能校准增益误差。然后,从实际输出值中减去0g场里的输出结果,消除失调误差。这种校准方法非常简单,但精度不足,因为仍然存在灵敏度误差。另一种方法是1g翻转校准,在+1g和–1g时采用两点校准,并在每个+1g和–1g场内按照以下公式测量加速度输出:

其中,失调A失调的单位为g。
以这两点信息为基础,可以按照以下方法解出失调和增益:

其中,+1g和 1g测量值、A+1g和A–1g均以g为单位。
经过这一次校准以后,可以用该等式计算实际加速度,每次都会消除失调误差和灵敏度误差。

其中,A失调和A输出以g为单位。
非线性度
器件的非线性度为测得加速度(AMEA)与理想线性输出加速度(AFIT)之间的最大偏差。加速度测量数据集应包括加速度计的满量程范围。其测量方式为Max(|AMEA – AFIT|)。
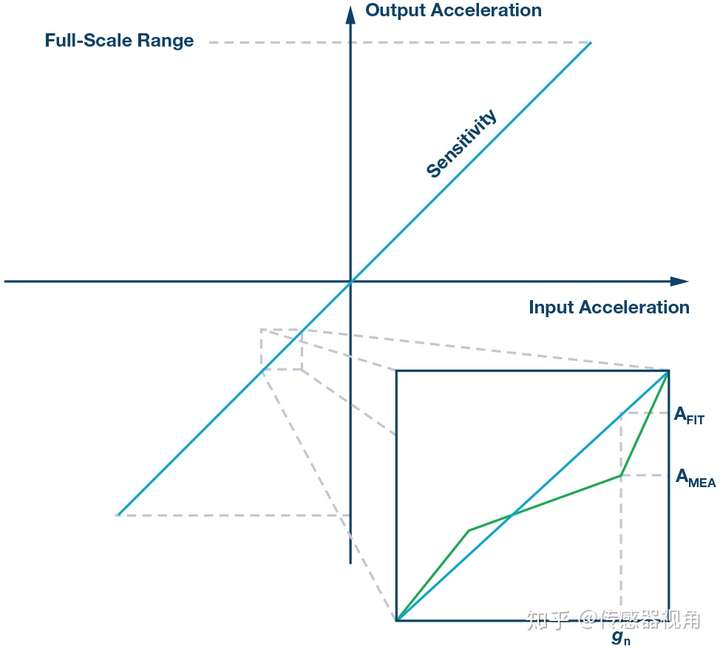
其中:
AMEA为给定gn下的测得加速度。
AFIT 为给定gn下的预测加速度。
多数加速度计或组合器件在给定输入加速度计范围内均存在非线性——例如,30 mg ± 2g的范围。对于倾角测量应用,输入坡道斜率在±30°以内,这意味着输出加速度范围在±500 mg (±1g× sin 30°)以内,所以应重新评估该范围内的非线性度。由于非线性度在整个输入范围内是非线性的,所以,很难准确地量化评估这部分误差。然而,由于该器件的数据手册通常都很保守,线性度为30 mg,输入范围为±2g,用10 mg计算±500 mg范围内的误差更合理些。
与初始绝对失调的总失调变化
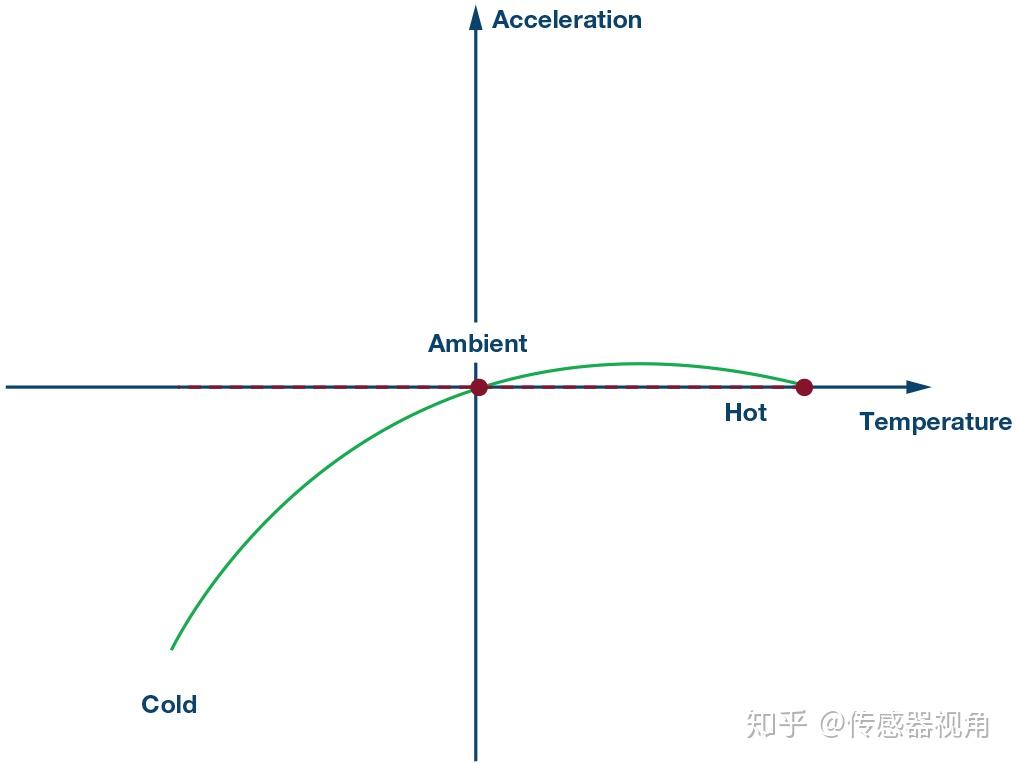
与初始绝对失调的总失调变化为温度、应力和老化效应导致的失调的最大偏差。该偏差是相对于给定器件的初始绝对失调进行测量的。这是精度总误差的主要贡献因素。
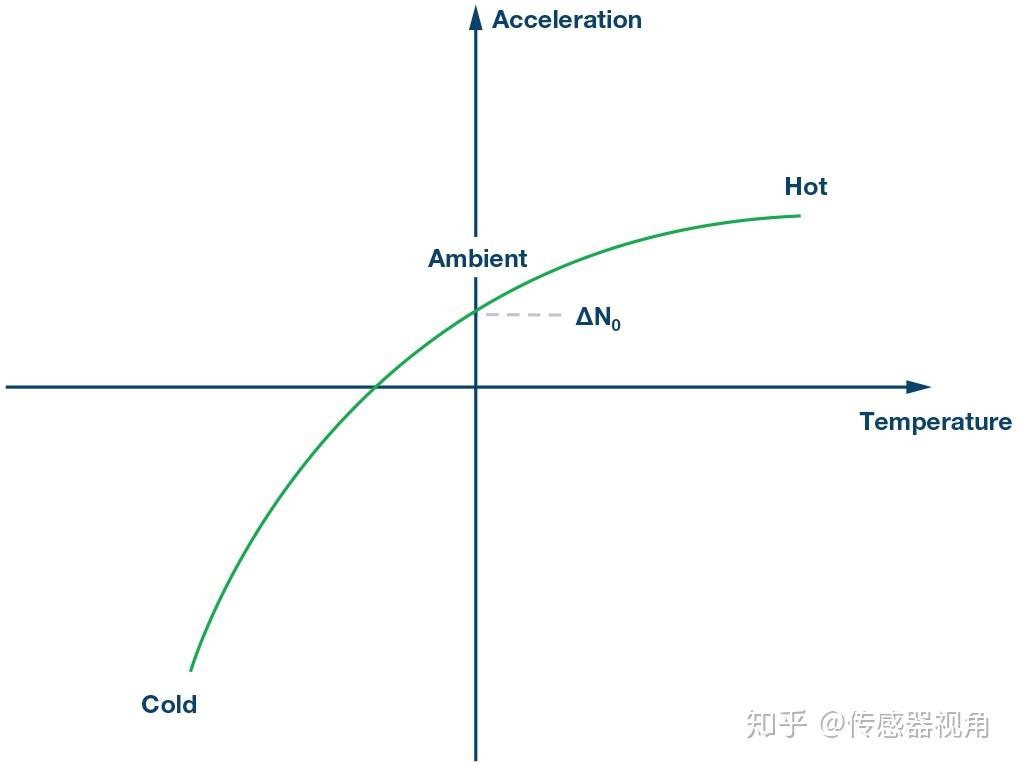
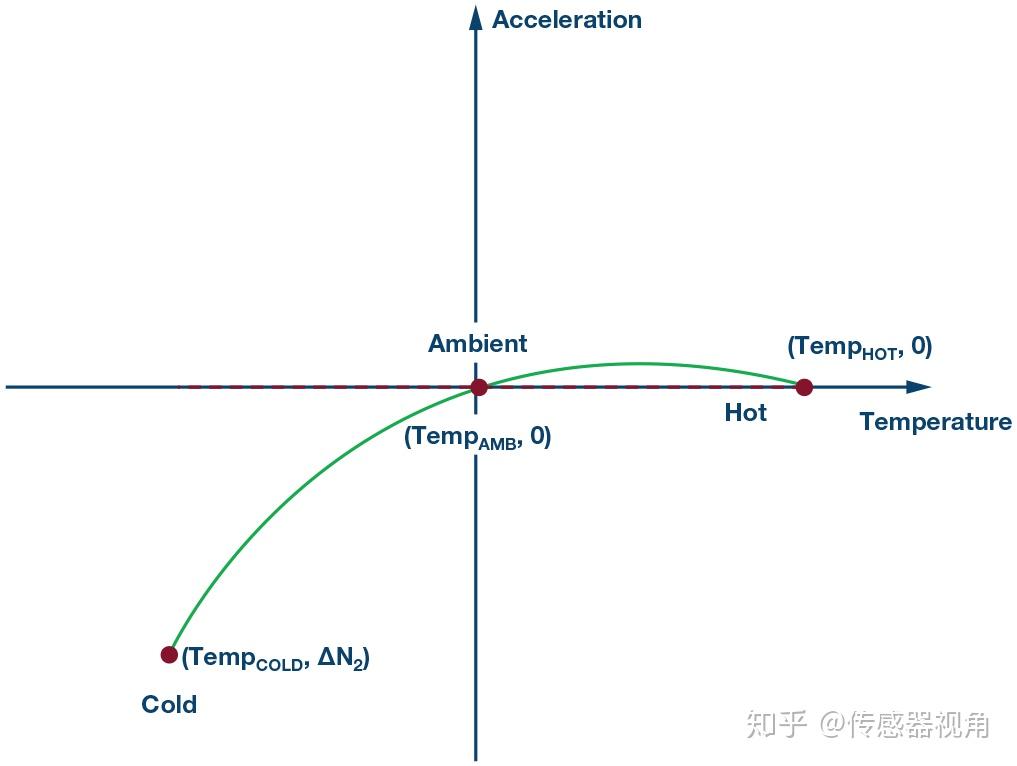
在温度、应力、老化等所有这些因素中,变化与温度在总失调变化中占比很大。一般地,变化与温度曲线是二阶曲线,通常为旋转抛物线。为了消除这部分误差,可以在系统级执行三点校准。对于给定器件,可按下列步骤校准输出失调随温度的变化值。
第1步:
使器件的输出响应以某个 ∆N0值偏移。温度校准流程的第一步是 消除环境温度下的失调。
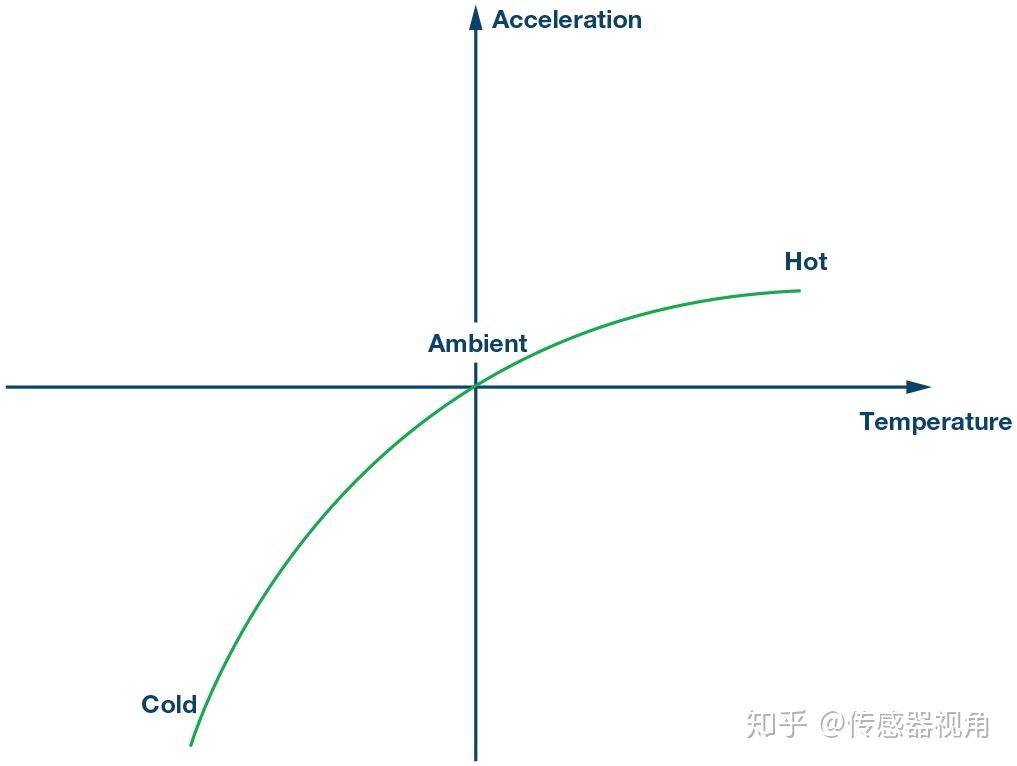
第2步:
接下来,在高温下测试器件,用获得的新信息生成失调校正线性公式。
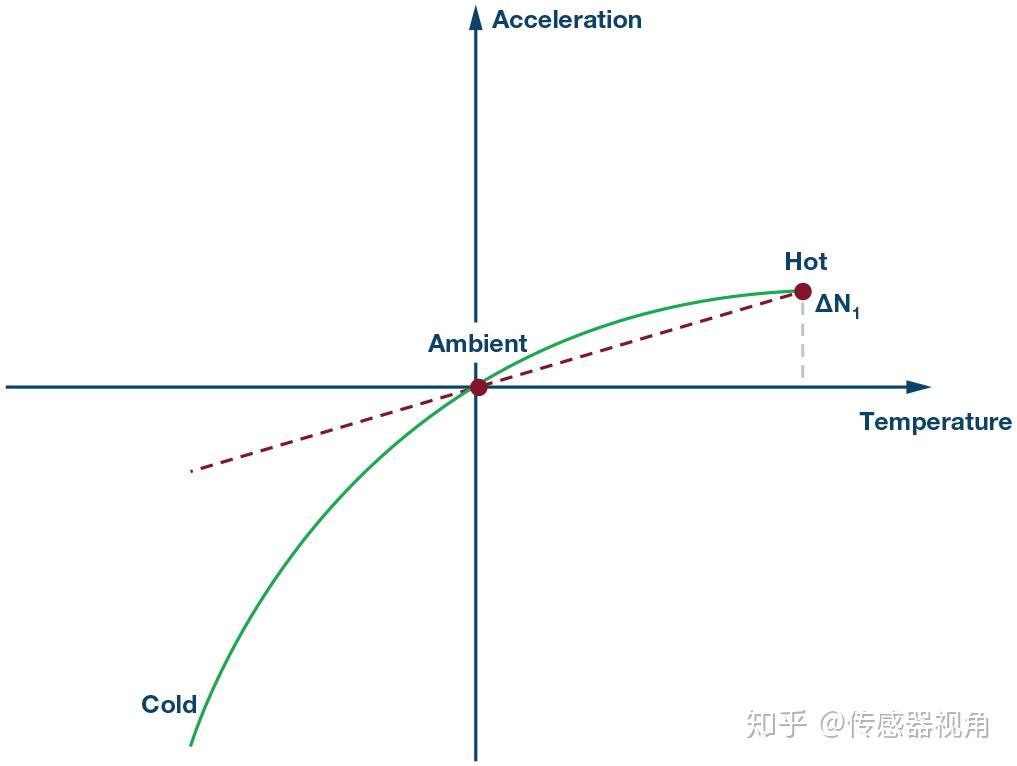
第3步:
给现有公式添加一个二阶分量,校正失调剩余部分。设二阶曲线遵循以下公式:

这是二阶抛物线公式,已经通过第1步和第2步消除了旋转分量。
在该公式中,该二阶抛物线有三个解:

然后,我们可以得到温度系数 a, b, c.
有关∆N0, ∆N1, ∆N2, a, b, c 的所有温度系数信息应该存储在系统非易失性存储器中,同时需要一个板载温度传感器。系统会在每次上电后例行校准加速度计,确保消除失调随温度的变化值。
噪声
基于单个数据样本测量倾角不一定可靠。即使加速度计的噪声为零,倾角测量也是在汽车启动时测量的,所以,需要减小发动机、过往车辆或乘客在车上来回移动导致的任何振动。最好的办法是在不降至最低数据速率要求的条件下,在尽量长的时间内做数据平均。数据平均算法会减少rms噪声。
假如我们对噪声采样,结果可得到每个样本的方差

求一个随机变量的均值,获得以下方差,

由于噪声方差保持于σ2不变,

以上推导显示,对同一未校正噪声的n次实现求均值可使噪声功率减少n倍,并使rms噪声减少√n。
由于随机噪声受高斯分布影响,所以,rms噪声等于高斯分布的标准差。6σ以内的最小分布为97%。
例如,如果以1 kSPS的采样率对每100 ms的数据求均值,则最大rms噪声 = 0.4 mg,即是说如果以6σ作为与平均值的距离,则此时的峰值噪声仅为2.4 mg。
用于与rms值相乘的因数取决于器件要执行的任务的统计需求。例如,如果选择6作为因数(峰峰值噪声为6 × RMS_Noise),则算法在器件生命周期内要运行的次数会影响超过最差情况6 × RMS_Noise 的概率。可总结如下:

E为在生命周期内超过最差情况的预期次数,M为生命周期内的运行次数,r为超过最差情况的概率。基于此,我们可以通过乘以rms噪声评估出一个合理的因数。
小结
以ADI公司的ADXC1500/ADXC1501(组合式陀螺仪和2轴/3轴加速度 计)为例,所有误差贡献项均列于表1中,包括校准和不校准两种情况。我们可以假设,总失调变化为二次曲线,并且其在温度范围内的变化占总失调变化的80%。另外,以6为因数乘以最大rms噪声。
一个陀螺仪和一个三轴加速度计的单芯片集成方案可以实现多种新型应用,尤其是在汽车安全系统和工业自动化应用领域。为了设计更加可靠、高精度的汽车安全系统,例如,稳定的电子控制系统(ESC)和侧翻检测系统,尽量减少系统误差至关重要。汽车中已安装这些传统型底盘控制系统,包括防抱死制动系统、牵引控制和偏航控制系统。

TMR磁传感器简介
磁传感器广泛用于现代工业和电子产品中以感应磁场强度来测量电流、位置、方向等物理参数。在现有技术中,有许多不同类型的传感器用于测量磁场和其他参数,例如采用霍尔(Hall)元件,各向异性磁电阻(Anisotropic Magnetoresistance, AMR)元件或巨磁电阻(Giant Magnetoresistance, GMR)元件为敏感元件的磁传感器。
以霍尔元件为敏感元件的磁传感器通常使用聚磁环结构来放大磁场,提高霍尔输出灵敏度,从而增加了传感器的体积和重量,同时霍尔元件具有功耗大,线性度差的缺陷。AMR元件虽然其灵敏度比霍尔元件高很多,但是其线性范围窄,同时以AMR为敏感元件的磁传感器需要设置Set/Reset线圈对其进行预设/复位操作,造成其制造工艺的复杂,线圈结构的设置在增加尺寸的同时也增加了功耗。以GMR元件为敏感元件的磁传感器较之霍尔电流传感器有更高的灵敏度,但是其线性范围偏低。
TMR(Tunnel MagnetoResistance)元件是近年来开始工业应用的新型磁电阻效应传感器,其利用的是磁性多层膜材料的隧道磁电阻效应对磁场进行感应,比之前所发现并实际应用的AMR元件和GMR元件具有更大的电阻变化率。我们通常也用磁隧道结(Magnetic Tunnel Junction,MTJ)来代指TMR元件,MTJ元件相对于霍尔元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更好的线性度,不需要额外的聚磁环结构;相对于AMR元件具有更好的温度稳定性,更高的灵敏度,更宽的线性范围,不需要额外的set/reset线圈结构;相对于GMR元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更宽的线性范围。下图是四代磁传感技术原理图。

下表是霍尔元件、AMR元件、GMR元件以及TMR元件的技术参数对比,可以更清楚直观的看到各种技术的优劣。
技术 | 功耗(mA) | 尺寸 (mm) | 灵敏度 (mV/V/Oe) | 工作范围 (Oe) | 分辨率 (mOe) | 温度特性 (℃) |
Hall | 5~20 | 1×1 | 0.05 | 1~1000 | 500 | <150 |
AMR | 1~10 | 1×1 | 1 | 0.001~10 | 0.1 | <150 |
GMR | 1~10 | 2×2 | 3 | 0.1~30 | 2 | <150 |
TMR | 0.001~0.01 | 0.5×0.5 | 20 | 0.001~200 | 0.1 | <200 |

右图是一个MTJ元件的结构原理图。MTJ元件由钉扎层(Pinning Layer)、隧道势垒层(Tunnel Barrier)、自由层(Free Layer)构成。钉扎层由铁磁层(被钉扎层,Pinned Layer)和反铁磁层(AFM Layer)构成,铁磁层和反铁磁层之间的交换耦合作用决定了铁磁层的磁矩方向;隧道势垒层通常由MgO或Al2O3构成,位于铁磁层的上部。铁磁层位于隧道势垒层的上部。如图所示的箭头分别代表被钉扎层和自由层的磁矩方向。被钉扎层的磁矩在一定大小的磁场作用下是相对固定的,自由层的磁矩相对于被钉扎层的磁矩是相对自由且可旋转的,随外场的变化而发生翻转。各薄膜层的典型厚度为0.1 nm到100 nm之间。
底电极层(Bottom Conducting Layer)和顶电极层(Top Conducting Layer)直接与相关的反铁磁层和自由层电接触。电极层通常采用非磁性导电材料,能够携带电流输入欧姆计,欧姆计适用于已知的穿过整个隧道结的电流,并对电流(或电压)进行测量。通常情况下,隧道势垒层提供了器件的大多数电阻,约为1000欧姆,而所有导体的阻值约为10欧姆。底电极层位于绝缘基片(Insulating Layer)上方,绝缘基片要比底电极层要宽,且位于其他材料构成的底基片(Body Substrate)的上方。底基片的材料通常是硅、石英、耐热玻璃、GaAs、AlTiC或者是能够于晶圆集成的任何其他材料。硅由于其易于加工为集成电路(尽管磁性传感器不总是需要这种电路)成为最好的选择。

右图所示的是在理想情况下的MTJ元件的响应曲线。在理想状态下,磁电阻R随外场H的变化是完美的线性关系,同时没有磁滞(在实际情况下,磁电阻的响应曲线随外场变化具有滞后的现象,我们称之为磁滞。磁电阻的响应曲线为一个回路,通常作为应用的磁电阻材料的磁滞很小,在实际使用中可以看做一个完美的线性曲线)。在现实应用的传感器领域,由于磁传感设计的制约以及材料的缺陷,这条曲线会更弯曲。本发明涉及了传感器的设计、结构以及能够生产实施的工序,该传感器具有卓越的工作感应,在工作区域内同时具有高线性度、低磁滞、高灵敏度的特点(即磁电阻响应曲线斜率大)。
R-H曲线具有低阻态RL和高阻态RH。其高灵敏度的区域是在零场附近,传感器的工作区间位于零场附近,约为饱和场之间1/3的区域。响应曲线的斜率和传感器的灵敏度成正比。如图3所示,零场切线和低场切线以及高场切线相交于点(-Hs+Ho)和点(Hs+Ho),可以看出,响应曲线不是沿H = 0的点对称的。Ho是典型的偏移场。Ho值通常被称为“橘子皮效应(Orange-peel Coupling)”或“奈尔耦合(Néel Coupling)”,其典型值为1到40 Oe。其与磁电阻元件中铁磁性薄膜的结构和平整度有关,依赖于材料和制造工艺。Hs被定量地定义为线性区域的切线与正负饱和曲线的切线的交点对应的值,该值是在响应曲线相对于Ho点的不对称性消除的情况下所取的。图3中,白色箭头代表自由层磁矩方向,黑色箭头代表钉扎层磁矩方向,磁电阻响应曲线随自由层磁矩和被钉扎层磁矩之间角度的变化而变化:当自由层磁矩与钉扎层磁矩反平行时,曲线对应高阻态RH;当自由层磁矩与钉扎层磁矩平行时,曲线对应低阻态RL;当自由层磁矩与钉扎层磁矩垂直时,阻值是位于RL和RH之间的中间值,该区域是理想的线性磁传感器的“工作点”。
上图中的内插图是另一个磁电阻R与外场H的响应曲线图,该磁电阻沿传感器的法线旋转了180°。在同一外场H的作用下,该磁电阻的响应曲线与主图对应的磁电阻的响应曲线呈相反的变化趋势。主图对应的磁电阻和旋转180°设置的磁电阻可以构造电桥,这被证明比其他可能的方法输出值更大。
电桥可以用来改变磁电阻传感器的信号,使其输出电压便于被放大。这可以改变信号的噪声,取消共模信号,减少温漂或其他的不足。MTJ元件可以连接构成惠斯通电桥或其他电桥。
右图是一个典型的MTJ推挽半桥传感器结构。沿传感器的法线旋转180°排列的两个MTJ磁电阻构成了半桥结构,其具有3个外接焊盘(Contact-Pad),依次为:偏置电压(Vbias)、中心点VOUT以及接地点(GND),桥式电路可通过焊盘进行电连,稳恒电压Vbias施加于焊盘Vbias端和GND端。在同一外场H的作用下,一个磁电阻的阻值增加的同时另一个的阻值会随之降低,施加相反方向的外场会使一个磁电阻的阻值降低的同时另一个的阻值会随之增加,使两个磁电阻测量外场有相反的响应——一个阻值增加另一个阻值降低——这可以增加传感器的灵敏度,因此被称为“推挽式”桥式电路。
推挽半桥传感器的输出电压可以通过很多已知的方法进行测量,例如在V1和GND焊盘之间连接电压表,V1和GND之间的电位差(V1-GND)就是输出电压,其典型的输出曲线的模拟结果如图4所示。

右图是MTJ电桥的输出曲线为模拟信号,可以通过设置一个专用的ASIC芯片对模拟信号进行处理,可根据用途输出数字信号。
巨磁电阻效应的发现者法国科学家阿尔贝·费尔(Albert Fert)和德国科学家彼得·格林贝格尔(Peter Andreas Grünberg)由于其对现代磁记录和工业领域的巨大贡献而获得2007年诺贝尔物理学奖,作为GMR元件的下一代技术,TMR(MTJ)元件已完全取代GMR元件,被广泛应用于硬盘磁头领域。相信TMR磁传感技术将在工业、生物传感、磁性随机存储(Magnetic Random Access Memory,MRAM)等领域有极大的发展与贡献。
MEMS传感器2021年增长约16%,达到创纪录的159亿美元
市调机构IC Insights《O-S-D(光电,传感器,和分立器件)Report 2021》在最新报告中预测了全球微机电系统 (MEMS)市场趋势。该机构预计,在2020年下半年全球半导体产业开始复苏后,采用MEMS技术制造的传感器和执行器在未来几年内将以两位数的高百分比增长。
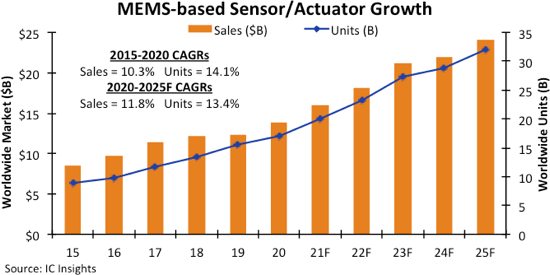
IC Insights认为,基于MEMS的压力传感器、麦克风芯片、加速度计、陀螺仪设备和执行器的总销售额预计将每年以两位数的百分比增长,在2021年增长约16%,达到创纪录的159亿美元。
尽管2020年初,疫情的蔓延对全球各个产业带去巨大冲击,但2020年下半年开始,MEMS传感器/执行器产品开始复苏,并持续增长,这也离不开当时看到关键终端市场的稳定和复苏迹象后迅速开始补充库存MEMS制造商。
该报告还分析,从2020年至2025年,MEMS传感器和执行器市场规模预计将以11.8%的复合年增长率增长至241亿美元,出货量将以13.4%的复合年增长率增长至321亿颗。
这份长达350页的《O-S-D(光电,传感器,和分立器件)Report 2021》报告数据显示,2020年,在总价值为165亿美元的半导体传感器/执行器市场中,约有83%的市场价值来自采用MEMS技术的传感器/执行器。2020年全球出货的309亿颗半导体传感器和执行器中,约有55%采用MEMS技术。每年大约 44% 的基于 MEMS 的传感器和执行器的销售额来自汽车应用。
基于MEMS的压力传感器、麦克风、加速度计、陀螺仪等传感器和执行器的总市场规模预计将每年以两位数的百分比增长,至2024年,也就是下一次周期性经济放缓之时预计增长降至4%,随后2025年温和反弹9%。
2022年惯导系统全球市场将达 45 亿美元
惯导系统的市场正起步,2022 年全球市场空间将达 45 亿美元,其中,车用高精度的惯性导航是随着智能驾驶的兴起新增的市场。
根据半导体/传感器研究机 构 Yole development 的估计,惯性传感器 IMU 的 2018 年的全球市场空间为 1.6 亿美元,到 2022 年将达 9 亿美元。
惯性导航传感器价格一般是惯性导航系统 的 1/5,由此测算惯导系统的全球市场空间在 2018 年为 8 亿美元,至 2022 年 为 45 亿美元,对应 2018-2022 年 CAGR 为 54%。
自动驾驶 IMU 市场规模 资料来源:Yole development,基业常青
目前,国内惯导系统研发尚处起步阶段。
美国国防部把从事惯性技术领域研究和开发的国家分为 4 个层次,中国 整体处于具备部分研发能力的第三梯队。
惯性技术领域研究的开发国家的 4 个层次 资料来源:基业常青
国内的惯性导航组合研发起步较晚,技术上与国外存在不小的差距。惯 性导航传感器的核心元器件是加速度传感器和陀螺仪,应用领域分为消费级、 工业级和汽车级、军工级和宇航级。各个领域中均是国外企业占据领先地位。
MEMS 惯性传感器研发、制造商一览表 资料来源:基业常青
全球市场:全球高性能的 MEMS 惯导主要掌握在以下几家企业手中: Honeywell、Analog Devices Inc、Sensonor、Silicon Sensing Systems 及 Systron Donner (QMEMS)。但面向武器装备和船舶为主,高精度,高成本,几乎全 线禁运,并且价格高昂,最便宜的 ADI 低端战术级精度价格>2 万元。
国内市场: 国内传统惯导技术源头包括航天科技 13 所、航天科工 33 所、 船舶 707 所、航空 618 所及兵器 214 所等。主要为军工企业,面向武器装 备为主,高精度,高成本,低产量,对民用市场不敏感。
Murata(VTI)3D MEMS传感器的结构和特点
3D MEMS (3D Micro-Electro-Mechanical-System—3维微机电系统) 通过创造性地结合相关技术,将硅材料加工成3维结构并进行密封,使之便于安装和组装并具有精度高、单位体积小、功耗低的特点。被装配在微小的硅材料内部的先进传感器,能够对相互垂直的3个轴向的加速度进行测量。
利用3D MEMS技术,研制出了高精度倾角传感器的理想的构造。如通过在内部的加速度传感器内增设机械衰减机制,使得倾角传感器和高分辨率测高计即使在强烈震动的环境中也能正常工作。这些传感器产品的耗电量极低,这一优势在通过电池驱动的设备中能够很明显的体现出来。
所开发的倾斜计采用了3D MEMS技术,在角度检测时能够达到小于1分的精度等级,可从容应对较高级别的水平度测量,在性能方面优于其他所有的MEMS技术。优异的性能与微安级的耗电量相结合,使之成为了无线应用的理想选择。
3D MEMS的优点
单晶硅:理想的弹性材料,无塑性形变,可承受70,000g的力。
电容式感应
对惯性质体的位置变化进行直接测量
两平面间多样性的面间距
电容C (一对平面间的电荷存储容量) 是由面间距d和面积A决定的
C = e0×A/d
高精度、良好的稳定性,并且由于使用的电容器数量少易于实现自我诊断。
耗电量低
密封结构
所需的外壳尺寸小。
可靠性: 粉末颗粒或工程试剂等杂质不会侵入产品内部。
对称结构
加速度传感器的零点稳定性、更好的线性和它轴灵敏度
温度特性低于0.2mg/℃
非线性的标准值低于1%
他轴灵敏度的标准值低于3%
定制品
可根据应用场合调整至特定的灵敏度和频率响应
灵活的两片式构造
真正意义上的3D结构
大惯性质体,凭借大容量实现高性能、低重力加速度的检测
零点稳定性和噪声性能
使3D传感元件成为可能
Murata MEMS传感器在Low-G动作测量上的介绍
加速度测量的原理十分简单并且相当可靠,其理论基础为与惯性质量有关的牛顿第二定律。
加速度传感器元件的基本构成包括主体、弹簧和惯性质体。当传感器主体的速度发生变化时,会产生随着速度变化而变化的力,该力将通过弹簧被施加于惯性质体上。具体来说,首先该力使弹簧发生弯曲,然后元件主体与惯性质体的距离会与加速度成比例地发生变化。
传感器的工作原理会根据主体与惯性质体相对移动的检测方式的不同而有所差异。电容式传感器,主体与惯性质体是相互绝缘的,通过测量电容来检测加速度。当主体与惯性质体之间的距离减小时,电容就会增加,电流会向传感器的信号处理IC流动。距离增加时,情况则会相反。传感器可将主体的加速度转化为电流、电荷、电压三者之一从而进行测量。
核心技术,传感器可通过微小的电容变化来进行相关测量,该模式特别适合被用于检测传感器的细微运动,且性能卓越。加速度传感元件是以单晶硅和玻璃为材料制成的,因此传感器产品可轻松应对使用时间和温度变化带来的各种挑战,具有出色的可靠性和稳定性以及前所未有精度。
量程1g的传感元件能够承受超过50,000g标准的加速度 (1g=地球引力所产生的重力加速度) 。电容式的传感元件不仅能够测量正负两个方向的加速度,还能检测静止加速度和振动。
Low-G加速度传感器和倾斜传感器的核心部分,是两个位置对称的以体型微加工技术制成的具有电容特性的加速度传感器元件。对称的结构不仅减小了温度依赖性和它轴灵敏度,还提升了线性。密封性是通过以阳极接合的方式使晶元相互接合来实现的。
因此,传感元件的封装变得更容易,可靠性也更好,同时传感器内阻尼气体的使用也成为可能。
3轴检测
3轴加速度传感器的设计理念是始终沿袭使用1轴加速度传感器的方式。3轴加速度传感器元件所用到的技术包括由1轴加速度传感器发展而来的技术,Bulk MEMS工艺以及电容检测结构等。

传感器元件元件内部有多个质量块,这些通过分散MEMS技术加工出的质量块被晶元表面周围的扭转弹簧支撑着。与表面MEMS工艺相比,厚度和重量都更大,从而可以实现高灵敏度和低噪音。
最终的检测结果由将多个质量块的检测结果矢量叠加得到的。质量块的上下两侧具有电容检测的功能。当质量块被施加一个加速度时,通过扭转弹簧的作用,质量块会向旋转方向运动,从而质量块上下两侧的电容会随之发生变化。
多个质量块的矢量组成通过内部的ASIC进行合成计算,就能输出传感器X,Y,Z三个方向的加速度。根据计算结果就能够实现3轴的高精度线性响应。
MuraTa单晶硅电容传感器MEMS介绍
Murata公司的硅电容传感器是用单晶硅及玻璃制成,可在长时间、宽温度范围内保持高可靠性、准确性、及稳定性。依靠半导体产业的制造技术,能保证量产与安定的价格。此外,还拥有晶片结合、硅深反应离子刻蚀(DRIE: Deep Reactive Ion Etching) 等MEMS特有的技术。
使用的是两个表面之间距离变化为基础的简单、稳定的静电容量检测原理。两个表面的静电容量(蓄电量)的距离根据重合部分的不同而不同。3D MEMS传感器结构坚固、对惯性及压力灵敏度高,但不会对其他的环境变化因素和故障原因产生反应。例如,将加速度传感器及陀螺仪左右对称放置,依据设计原理,可以提高稳定性、直线性、他轴灵敏度、振动灵敏度。
本公司的3D MEMS采用晶圆级工艺封装(密封)。粒子、化学品等无法进入密封的传感器中,可靠性得到了保证。本公司已率先在玻璃晶圆上使用硅通孔,减小了产品的空间,实现了封装工艺的简单化。
配合用途,加速度传感器、陀螺仪的圧力传感元件的灵敏度、测量范围、响应频率都可以进行调整。加速度传感器及陀螺仪的平面及Z轴测量,可以实现3轴感知。陀螺仪可以用来检测地球自转这类微小信号,也可以追踪人的手的移动这类大幅度运动的信号,用途广泛。
使用SiP (System in Package)技术,将1个或多个感应元件放入信号处理电路中。结构非常坚固、高可靠性的膜制塑料封装,常被用于汽车产品及工业产品。
传感器干扰问题的种类及处理方法
传感器是一种检测仪器,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出。传感器在使用过程中会产生一定的干扰问题,一直影响着传感器的测量精度。今天我们一众传感仪器有限公瓦器为您来介绍一下传感器干扰问题的忠烈及处理方法,希望可以帮助到大家。
干扰一直影响着传感器的测量精度,干扰源、干扰种类及干扰现象。传感器及仪器仪表在现场运行所受到的干扰多种多样,具体情况具体分析,对不同的干扰采取不同的措施是抗干扰的原则。这种灵活机动的策略与普适性无疑是矛盾的,解决的办法是采用模块化的方法,除了基本构件外,针对不同的运行场合,仪器可装配不同的选件以有效地抗干扰、提高可靠性。在进一步讨论电路元件的选择、电路和系统应用之前,有必要分析影响模拟传感器精度的干扰源及干扰种类。
主要干扰源
(1)静电感应
静电感应是由于两条支电路或元件之间存在着寄生电容,使一条支路上的电荷通过寄生电容传送到另一条支路上去,因此又称电容性耦合。
(2)电磁感应
当两个电路之间有互感存在时,一个电路中电流的变化就会通过磁场耦合到另一个电路,这一现象称为电磁感应。例如变压器及线圈的漏磁、通电平行导线等。
(3)漏电流感应
由于电子线路内部的元件支架、接线柱、印刷电路板、电容内部介质或外壳等绝缘不良,特别是传感器的应用环境湿度较大,绝缘体的绝缘电阻下降,导致漏电电流增加就会引起干扰。尤其当漏电流流入测量电路的输入级时,其影响就特别严重。
(4)射频干扰
主要是大型动力设备的启动、操作停止的干扰和高次谐波干扰。如可控硅整流系统的干扰等。
(5)其他干扰
现场安全生产监控系统除了易受以上干扰外,由于系统工作环境较差,还容易受到机械干扰、热干扰及化学干扰等。
2. 干扰的种类
(1)常模干扰
常模干扰是指干扰信号的侵入在往返2条线上是一致的。常模干扰来源一般是周围较强的交变磁场,使仪器受周围交变磁场影响而产生交流电动势形成干扰,这种干扰较难除掉。
(2)共模干扰
共模干扰是指干扰信号在2条线上各流过一部分,以地为公共回路,而信号电流只在往返2个线路中流过。共模干扰的来源一般是设备对地漏电、地电位差、线路本身具有对地干扰等。由于线路的不平衡状态,共模干扰会转换成常模干扰,就较难除掉了。
(3)长时干扰
长时干扰是指长期存在的干扰,此类干扰的特点是干扰电压长期存在且变化不大,用检测仪表很容易测出,如电源线或邻近动力线的电磁干扰都是连续的交流50Hz工频干扰。
(4)意外的瞬时干扰
意外瞬时干扰主要在电气设备操作时发生,如合闸或分闸等,有时也在伴随雷电发生或无线电设备工作瞬间产生。
干扰可粗略地分为3个方面:
(a)局部产生(即不需要的热电偶);
(b)子系统内部的耦合(即地线的路径问题);
(c)外部产生(Bp电源频率的干扰)。
3. 干扰现象
在应用中,常会遇到以下几种主要干扰现象:
(1)发指令时,电机无规则地转动;
(2)信号等于零时,数字显示表数值乱跳;
(3)传感器工作时,其输出值与实际参数所对应的信号值不吻合,且误差值是随机的、无规律的;
(4)当被测参数稳定的情况下,传感器输出的数值与被测参数所对应的信号数值的差值为一稳定或呈周期性变化的值;
(5)与交流伺服系统共用同一电源的设备(如显示器等)工作不正常。
干扰进入定位控制系统的渠道主要有两类:信号传输通道干扰,干扰通过与系统相联的信号输入通道、输出通道进入;供电系统干扰。信号传输通道是控制系统或驱动器接收反馈信号和发出控制信号的途径,因为脉冲波在传输线上会出现延时、畸变、衰减与通道干扰,所以在传输过程中,长线的干扰是主要因素。任何电源及输电线路都存在内阻,正是这些内阻才引起了电源的噪声干扰,如果没有内阻,无论何种噪声都会被电源短路吸收,线路中也不会建立起任何干扰电压;此外,交流伺服系统驱动器本身也是较强的干扰源,它可以通过电源对其它设备进行干扰。
抗干扰的措施
1、供电系统的抗干扰设计
对传感器、仪器仪表正常工作危害zui严重的是电网尖峰脉冲干扰,产生尖峰干扰的用电设备有:电焊机、大电机、可控机、继电接触器、带镇流器的充气照明灯,甚至电烙铁等。尖峰干扰可用硬件、软件结合的办法来抑制。
(1)用硬件线路抑制尖峰干扰的影响
常用办法主要有三种:
①在仪器交流电源输入端串入按频谱均衡的原理设计的干扰控制器,将尖峰电压集中的能量分配到不同的频段上,从而减弱其破坏性;
②在仪器交流电源输入端加超级隔离变压器,利用铁磁共振原理抑制尖峰脉冲;
③在仪器交流电源的输入端并联压敏电阻,利用尖峰脉冲到来时电阻值减小以降低仪器从电源分得的电压,从而削弱干扰的影响。
(2)利用软件方法抑制尖峰干扰
对于周期性干扰,可以采用编程进行时间滤波,也就是用程序控制可控硅导通瞬间不采样,从而有效地消除干扰。
(3)采用硬、软件结合的看门狗(watchdog)技术抑制尖峰脉冲的影响
软件:在定时器定时到之前,CPU访问一次定时器,让定时器重新开始计时,正常程序运行,该定时器不会产生溢出脉冲,watchdog也就不会起作用。一旦尖峰干扰出现了“飞程序”,则CPU就不会在定时到之前访问定时器,因而定时信号就会出现,从而引起系统复位中断,保证智能仪器回到正常程序上来。
(4)实行电源分组供电,例如:将执行电机的驱动电源与控制电源分开,以防止设备间的干扰。
(5)采用噪声滤波器也可以有效地抑制交流伺服驱动器对其它设备的干扰。该措施对以上几种干扰现象都可以有效地抑制。
(6)采用隔离变压器
考虑到高频噪声通过变压器主要不是靠初、次级线圈的互感耦合,而是靠初、次级寄生电容耦合的,因此隔离变压器的初、次级之间均用屏蔽层隔离,减少其分布电容,以提高抵抗共模干扰能力。
(7)采用高抗干扰性能的电源,如利用频谱均衡法设计的高抗干扰电源。这种电源抵抗随机干扰非常有效,它能把高尖峰的扰动电压脉冲转换成低电压峰值(电压峰值小于TTL电平)的电压,但干扰脉冲的能量不变,从而可以提高传感器、仪器仪表的抗干扰能力。
2、信号传输通道的抗干扰设计
(1)光电耦合隔离措施
在长距离传输过程中,采用光电耦合器,可以将控制系统与输入通道、输出通道以及伺服驱动器的输入、输出通道切断电路之间的。如果在电路中不采用光电隔离,外部的尖峰干扰信号会进入系统或直接进入伺服驱动装置,产生*种干扰现象。
光电耦合的主要优点是能有效地抑制尖峰脉冲及各种噪声干扰,使信号传输过程的信噪比大大提高。干扰噪声虽然有较大的电压幅度,但是能量很小,只能形成微弱电流,而光电耦合器输入部分的发光二极管是在电流状态下工作的,一般导通电流为10mA~15mA,所以即使有很大幅度的干扰,这种干扰也会由于不能提供足够的电流而被抑制掉。
(2)双绞屏蔽线长线传输
信号在传输过程中会受到电场、磁场和地阻抗等干扰因素的影响,采用接地屏蔽线可以减小电场的干扰。双绞线与同轴电缆相比,虽然频带较差,但波阻抗高,抗共模噪声能力强,能使各个小环节的电磁感应干扰相互抵消。另外,在长距离传输过程中,一般采用差分信号传输,可提高抗干扰性能。采用双绞屏蔽线长线传输可以有效地抑制前文提到的干扰现象中的(2)、(3)、(4)种干扰的产生。
3、局部产生误差的消除
在低电平测量中,对于在信号路径中所用的(或构成的)材料必须给予严格的注意,在简单的电路中遇到的焊锡、导线以及接线柱等都可能产生实际的热电势。由于它们经常是成对出现,因此尽量使这些成对的热电偶保持在相同的温度下是很有效的措施,为此一般用热屏蔽、散热器沿等温线排列。
")
All Sensors DLC系列压力传感器开发笔记
All sensors新出了一个系列性价比很高的微差压压力传感器----DLC系列。然而这个传感器对开发者来说却不是那么“友好”。总是或多或少会遇到一些问题,笔者根据自己的经验,总结了以下一些需要注意的地方,希望能够帮到各位开发者。
1. 硬件设计
也许你是10年硬件开发经验的老手,这不过是一个压力传感器罢了,IIC读取,就那么几根线,闭着眼都不会接错。是的,但是很多人眼睁睁的接错了。
首先封装形式,有D1、D3、D4、U1、U2、U5六种封装形式,其中D封装是双气嘴封装,U封装是单气嘴封装。
不同于一般的IIC传感器,DLC系列多出一个EOC引脚,很多开发者会认为这个引脚没有作用,不接。如果不接,软件工程师就马上有疑问了:为什么我读取的值都是FF! 传感器有问题!!!
如下图,很多软件工程师都会选择性地不去看EOC的状态,但是EOC却起着决定是读到FF还是其它值的作用。那么什么是EOC呢?EOC是传感器输出的一个状态表示位,EOC为低电平时,表示传感器内部在读数,此时去读传感器只能读到FF,EOC为高电平时,才能读到数值。
Mark一下,是传感器输出,不是输入!有些开发者给EOC接上拉或者下拉,然后发现EOC的状态没有变化,传感器有问题!!
如果不接EOC可行吗?回答是也可以,不过,读取数据时要注意时序,在EOC刚好高电平的时候读数,这对时序要求比较高,如果软件兼有其它传感器或者功能,建议要连接EOC。当然也可以采取轮询状态的方式。
D4封装也是常见的一个封装,也是很多开发者容易忽视硬件问题的封装:
如图,NOTES里面提示:
第4点:Do not connect any signal to Pin 1,3,14.
第5点 PCB must connect Pin13 to Pin16
很多老鸟喜欢忽视手册,不确定接的时候,就接了个GND,然后就发现传感器读数不出来,马上提出,传感器有问题!!!
另外,这里的Pin13 toPin16 是指把第13脚和第16脚连接起来,而不是把13到16脚之间的引脚连起来。
2. 软件设计
如果硬件连接对了,软件部分基本上没有什么难度。
如果硬件连错了,那么软件调试相当困难。
所以开发者看到这一步的时候,可以返回去看看自己的硬件设计部分,看看硬件部分是否存在问题。
现在开始软件部分
首先是IIC地址,手册的第五页,十进制的地址41,换算成十六进制则是0x29.
然后是读取指令,DLC系列给出了一个指令表:
如图,经过我们验证,0xAF二进制为10101111,0xAE二进制为10101110。。。。这几个指令二进制形式上很接近,很容易受到干扰,故建议开发者如果要读取多次平均的值,可以发送0XAA,读取单次的值,然后再自己做平均。
这里贴出一段DLC系列的压力读取程序(没有读取EOC,仅作参考):
voidRead_DLC_0XD(void)
{
u8 I2c_Address = 0x29;
u8 Read_Commond = 0xAA;
u8 DLC_DATA[7] = {0x00};
u8 Status;
u32 Pressure_data,Tempertaure_data;
IIC_Init();
IIC_Start();
IIC_Send_Byte((I2c_Address)<<1|0); //write
IIC_Wait_Ack();
IIC_Send_Byte(Read_Commond); //1mps
IIC_Wait_Ack();
IIC_Stop();
delay_ms(360);
IIC_Start();
IIC_Send_Byte((I2c_Address)<<1|1); //read
IIC_Wait_Ack();
DLC_DATA[0]=IIC_Read_Byte(1); //STATUS[7:0]
DLC_DATA[1]=IIC_Read_Byte(1); //PRESSURE[23:16]
DLC_DATA[2]=IIC_Read_Byte(1); //PRESSURE[15:8]
DLC_DATA[3]=IIC_Read_Byte(1); //PRESSURE[7:0]
DLC_DATA[4]=IIC_Read_Byte(1); //TEMPERATURE[23:16]
DLC_DATA[5]=IIC_Read_Byte(1); //TEMPERATURE[15:8]
DLC_DATA[6]=IIC_Read_Byte(0); //TEMPERATURE[7:0]
IIC_Stop();
Status = DLC_DATA[0];
Pressure_data=(DLC_DATA[1]<<16)|(DLC_DATA[2]<<8)|DLC_DATA[3];
Tempertaure_data=(DLC_DATA[4]<<16)|(DLC_DATA[5]<<8)|DLC_DATA[6];
}
补充一下Status,Status是状态位,手册上有状态位的说明:0x40是正常的状态。如果读到其它状态了,请根据提示找问题。
3. 压力计算
程序读出来了,计算压力却始终不对,这可郁闷了。
以手册公式为例,我们来计算一个DLC-L01D的压力值:
Poutdig 是程序读到的值,假设读到的值为0XBF5A4A
OSdig 可以从手册上的参数表查得:LXXD为0.5*224
FSS也可以从参数表中获取:LXXD为+/- 0.4*224注意单位是counts,如果换算成压力单位 inch,L01D的FSS应该为1-(-1)=2.
所以读值为0XBF5A4A的压力为:
1.25*【(0XBF5A4A-0.5*224)/224】*2 =0.6inch
如果要转换成Pa,inch与Pa的转换关系为1inch=249Pa,故当前应为0.6*249=149.4Pa
以上就是我的DLC系列开发心得,转自项目管理与精益制造公众号。欢迎开发者们咨询All Sensors代理商科沃电子
Tel:17764509575, zf@cowo.net.cn。
磁力计 / 磁传感器 / 罗盘品牌列表
中国-矽睿科技(QST)三轴地磁传感器:QMC6310,QMC5883L,QMC783,QMC6983
无锡美新(MEMSIC)
明皜传感(MiraMEMS)
江苏多维(dowaytech)
旭化成微电子(AKM Semiconductor)
Allegro
Micronas
Melexis
爱知制钢(Aichi Steel)
雅马哈(Yamaha)
阿尔卑斯电气有限公司(Alps Electric)
意法半导体(ST Microelectronics)
Amotech
飞思卡尔(Freescale)
霍尼韦尔(Honeywell)
松下(Panasonic)
精量电子(Measurement Specialties)
英飞凌(infineon)
Baolab
mCube
美国-PNI公司:
地磁传感器套件RM3100(包括专用驱动芯片13156,Sen-XY轴地磁传感器13104,Sen-Z Z轴传感器13101)
台湾-爱盛科技(isentek): http://www.isentek.com/
三轴AMR地磁传感器
消费级产品线:IST8305,IST8306,IST8315
工业级产品线:IST8307,IST8308,IST8310,IST8308A
AMR电流传感器:IST8110,ICSM1000(模块)
角度传感器:IST8210(180度)
OMRON静态人体检测传感器D6T常见问题
D6T-1A-01遇到的常见问题
Q:检测角度的问题是不是和检测点的数量有关?我们的样品是1*1点位,参考规格书里面1*8点位的,只有一个点位的y方向只有6°的视角,想要增大检测角度是否需要增加检测位点?
A:不是,D6T-1A-01是角度比较大的,每个产品都不一样,并不是点数越多视野角度就大的。1*8点的传感器型号角度就更小。
Q:角度和距离都跟算法有关是吧?
A:与算法不相关,这个是工厂固定的。但距离会影响算法,算法需要根据距离,考虑现场环境做出推论。
Q:可是检测到的角度不是很理想,只有大约十几二十度,即使是距离很近的时候,角度也很小?
A:距离与角度没有关系,距离近,角度不变,只是被测面积范围更小。比如传感器与被测目标离10CM,那么你检测范围就是10CM为直径的一个平面,而距离被测目标30CM就是一个30CM直径的平面,角度是一定的,不会由距离远近变化,只是距离远,平面面积增大了。
Q:D6T-1A-01平面增大检测范围应该会大了才对吧?
A:是的,3M的距离,一个3M直径的空间内的物体温度会平均化,比如人体36度,边上的物体只有15度,而且人体占面积只有0.8个平方,那其他的物体温度就把会整体温度拉低.
Q:当环境温度升高接近人体温度后,根据公式Tx = (环境参考温度+目标物体温度)/Area,那么Tx即使检测到人变化应该也不大?
A:是这样的
Q:所以关键是要设定好参考的温度,而且是在具体环境中?
A:是的。
Q: 手册中下图表tPAT就是指参考温度了吧? tP[0]-tP[15]就是指对象物体温度了吧?

A: tPAT是环境温度,tP[0]-tP[15]指矩阵内被测对象物体温度。也就是下图中的Tx温度值。

Q:下图中的高度距离是以完全遮挡检测范围作为参照面的?

![]()
A:是的,距离越远,面积就会越大,前提是中间没有遮挡物。